Isaac Sim Dynamic Store: A Technical Framework for Robotic Training in Retail Environments

Abstract
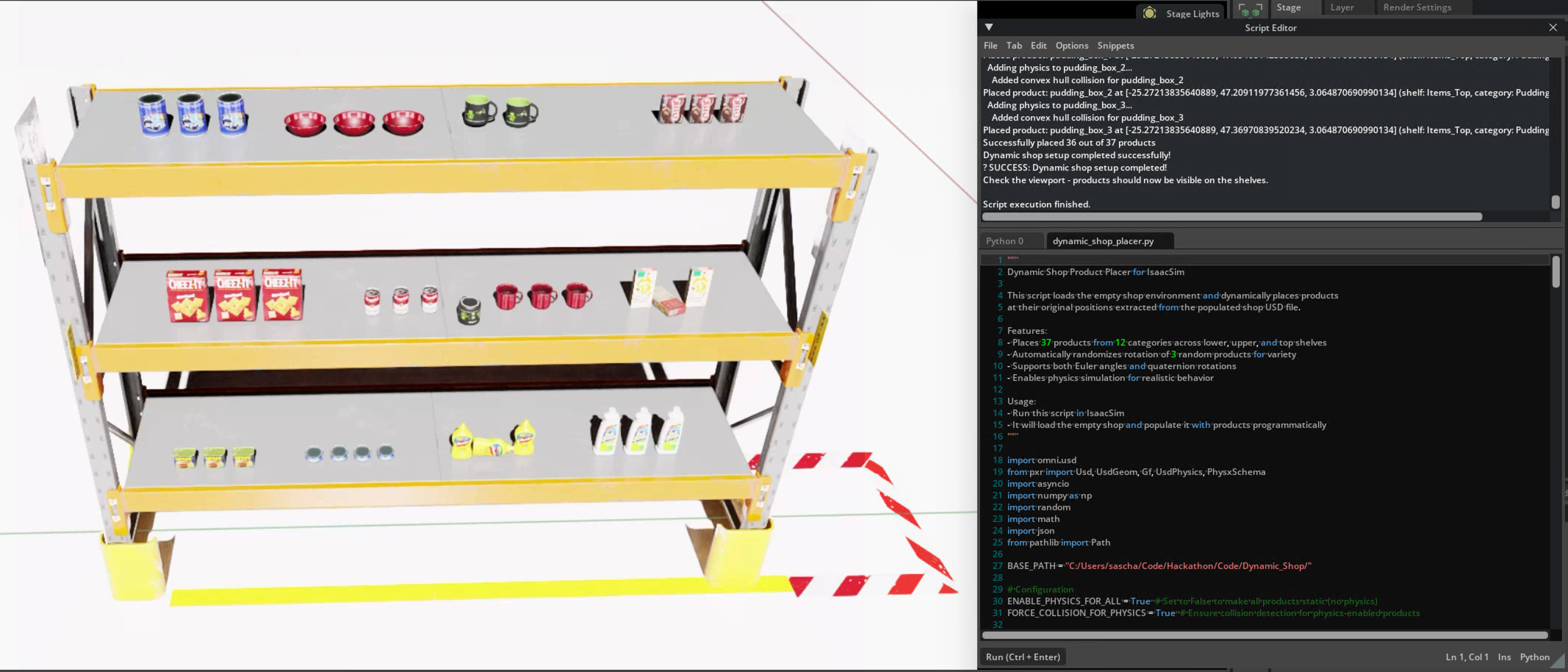
The isaac_sim_dynamic_store GitHub repository presents a Python-based framework for programmatically generating dynamic retail environments within NVIDIA Isaac Sim. This technical solution addresses a critical challenge in robotics simulation: creating realistic, variable retail scenarios for training autonomous systems without manual scene composition overhead.
Technical Problem Statement
Traditional retail simulation environments require extensive manual placement of products, creating static scenes that limit training data variability. This approach presents several technical limitations:
- Static Environment Bias: Pre-populated scenes lack the environmental variation necessary for robust robot training
- Manual Scaling Limitations: Hand-placing assets becomes computationally expensive for large-scale training datasets
- Physics Integration Complexity: Coordinating realistic object physics across multiple assets requires systematic management
System Architecture
Core Components
The framework implements a modular architecture centered around the DynamicShopPlacer class, which orchestrates:
USD Integration Layer
- Loads empty shop environment (
Shop Minimal Empty.usda) as base scene - Manages external asset references from Omniverse content servers
- Implements payload system for efficient USD asset loading
Product Data Management
- JSON-based configuration system (
product_data.json) storing 37 products across 12 categories - Dual rotation support: Euler angles (
rotateZYX) and quaternions (orient) - Hierarchical organization by shelf level (Lower/Upper/Top)
Physics Simulation Engine
- Selective physics enablement: 22 dynamic objects, 15 static objects
- ConvexHull and mesh collision detection algorithms
- Initial velocity assignment for realistic object behavior
Technical Specifications
Coordinate System
Origin: Shop front at X=-25
Shelf depth: Y coordinates 44-48 (4-unit depth)
Height levels: Z coordinates 0.8-3.1 (ground to top shelf)
Scale: 1.333x uniform scaling for most products
Asset Libraries
- YCB Dataset: 34 products from Yale-CMU-Berkeley Object and Model Set
- Isaac Props Food: 3 specialized food simulation assets
- Isaac Props Mugs: 3 mug variants with physics properties
Performance Characteristics
- Load time: 5-10 seconds (network-dependent)
- Placement execution: 3-5 seconds for 37 products
- Memory overhead: 50-100MB (asset caching)
- Physics simulation: 60 FPS with 22 dynamic objects
Robot Training Applications
Environment Variability
The system's randomization capabilities directly address key robotics training requirements:
Stochastic Object Placement
- 3 products receive random rotations per simulation run
- Configurable physics parameters enable controlled chaos scenarios
- Dynamic placement prevents overfitting to specific arrangements
Realistic Physics Integration
- Rigid body dynamics simulate real-world object interactions
- Collision detection prevents common simulation artifacts (fall-through)
- Initial velocity assignment creates dynamic pickup/manipulation scenarios
Training Scenario Generation
Manipulation Task Training
- Products with physics enabled (spam cans, tuna cans, mugs, bowls) provide grasping targets
- Static products (mustard bottles, cracker boxes, tomato cans) serve as stable reference objects
- Multi-tier shelf system (0.8m to 3.1m height) challenges reach planning algorithms
Navigation and Perception
- Organized hierarchy creates predictable semantic structure for object detection training
- Varied product categories (cylindrical cans, rectangular boxes, irregular mugs) provide diverse shape primitives
- Consistent scaling (1.333x) maintains realistic proportions across assets
Failure Mode Simulation
- Physics-enabled objects can fall, creating recovery scenarios
- Initial velocities simulate external disturbances
- Collision interactions model real-world constraint violations
Implementation Details
Configuration Management
The system provides granular control through configuration flags:
ENABLE_PHYSICS_FOR_ALL = True # Global physics toggle
FORCE_COLLISION_FOR_PHYSICS = True # Collision enforcement
Product Data Structure
{
"product_id": {
"asset": "omniverse://server/path/to/asset.usd",
"translate": [x, y, z],
"rotate": [rx, ry, rz],
"scale": [sx, sy, sz],
"physics_enabled": boolean
}
}
Extensibility Framework
Custom Product Integration
- Modular product data structure enables rapid scenario expansion
- Asset URL system supports both local and remote USD files
- Physics property inheritance simplifies configuration management
Environment Customization
- Base environment substitution through USD path modification
- Coordinate system transformation via translate value adjustment
- Hierarchical organization modification through category mapping
Validation and Testing Infrastructure
The repository includes comprehensive testing utilities:
Data Integrity Verification
verify_data.py: Validates JSON structure and file dependenciestest_product_data.py: JSON schema validationanalyze_physics.py: Physics configuration analysis
Feature Testing
test_randomization.py: Randomization algorithm verificationcount_products.py: Asset inventory managementtest_and_usage.py: Complete integration testing
Technical Advantages for Robotics
Simulation Fidelity
- External asset references ensure consistent, professional-grade models
- Physics parameter tuning enables realistic vs. accelerated simulation modes
- Collision geometry optimization balances accuracy with computational efficiency
Training Data Generation
- Programmatic scene generation enables automated dataset creation
- Randomization prevents simulation-to-reality gap issues
- Hierarchical organization supports semantic understanding tasks
Development Workflow
- USD-based architecture integrates with existing Omniverse pipelines
- Modular design supports iterative development and debugging
- Configuration-driven approach reduces code modification requirements
Conclusion
The isaac_sim_dynamic_store framework demonstrates an approach to automated retail environment generation for robotics training. By combining USD asset management, selective physics simulation, and programmatic scene composition, it addresses core challenges in creating diverse, realistic training scenarios.
The system's technical architecture prioritizes both simulation fidelity and computational efficiency, making it suitable for large-scale robot learning applications. Its extensible design and comprehensive testing infrastructure position it as a robust foundation for retail robotics research and development.
For robotics teams developing manipulation, navigation, or perception capabilities in retail environments, this framework provides a technically sound starting point that balances realism with computational practicality.